Opis produktu
KSMIT3: Samowystarczalny system nagłówków i odniesienia do postaw
KSMIT3 to najnowocześniejszy system pozycjonowania i odniesienia, który jest w pełni funkcjonalny, samodzielny moduł.co ułatwia integrację z każdym systemem.
Ten innowacyjny system może pochwalić się w pełni udokumentowanym i standardowym w branży protokołem komunikacyjnym, który umożliwia dostosowanie wiadomości danych pod względem częstotliwości, formatu wyjścia i danych.Sygnał jest przetwarzany całkowicie na tablicy.Ta funkcja sprawia, że KSMIT3 jest idealny do użytku w prostych środowiskach operacyjnych MCU.
KSMIT3 charakteryzuje się wysoką dokładnością w warunkach dynamicznych z dokładnością przewracania i rzucania 1 stopnia RMS, a także dokładnością odchylenia 2 stopni RMS.co sprawia, że jest doskonały do użytku w kontroli i stabilizacji dowolnego obiektu lub nawigacji, takich jak drony.
Cechy
● Pełna wydajność AHRS na modułach 12,1 x 12,1 mm
● Dokładność przechylenia (dynamiczna) 1,0 stopnia
● Dokładność biegu 2,0 stopnia
● Bardzo niskie wymagania wobec głównego procesora
● Jednolity interfejs dla całego cyklu życia produktu
● Niska moc (45 mW przy 3,0 V)
● Kompatybilny z płytami PCB PLCC28 (12,1 x 12,1 x 2,6 mm)
Parametry techniczne
| Pozycja |
Parametry (typowe wartości) |
| POWIADNIE PRZECZYTOŚCI |
Dokładność przechylenia (dynamiczny) |
2 stopnie (rms) |
| Dokładność obrotowa/pITch (dynamiczna) |
1 stopnia (rms) |
| Gyroskopy |
Pełna skala |
± 2000°/s |
| Stabilność stronniczości w trakcie biegu |
10°/h |
| Nieliniowość |
00,1% |
| Zmiana współczynnika skali |
00,05 proc. |
| g-wrażliwość |
0.1°/s/g |
| Gęstość hałasu |
00,01o/s/√Hz |
| Szerokość pasma (-3dB) |
180 Hz |
| Akcelerometry |
Pełna skala |
± 16 g |
| Stabilność stronniczości w trakcie biegu |
00, 1 mg |
| Nieliniowość |
00,5% |
| Zmiana współczynnika skali |
00,05 proc. |
| Gęstość hałasu |
200 μg/√Hz |
| Szerokość pasma (-3dB) |
180 |
| Magnetometr |
Pełna skala |
6 gaussów |
| Nieliniowość |
00,1% |
| Rozstrzygnięcie |
120uguss |
| Hałas (rms) |
50ugauss |
| Interfejsy |
Napięcie zasilania |
3.3v prąd stały |
| łączność z portem seryjnym |
TTL |
| Częstotliwość wyjścia |
100hz@230400 baudów |
Ramy odniesienia
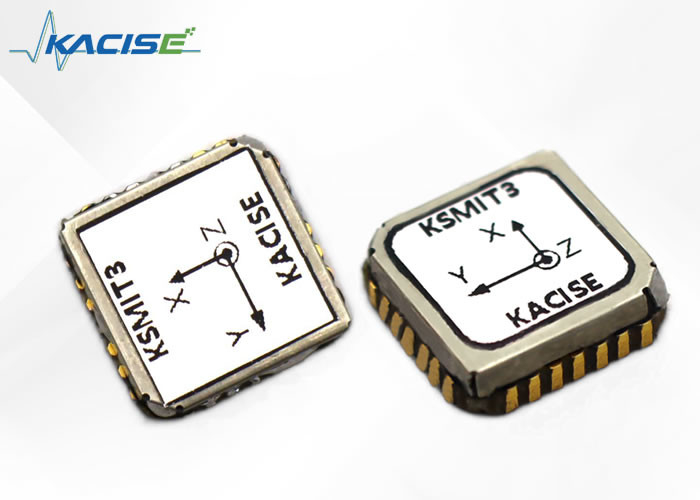
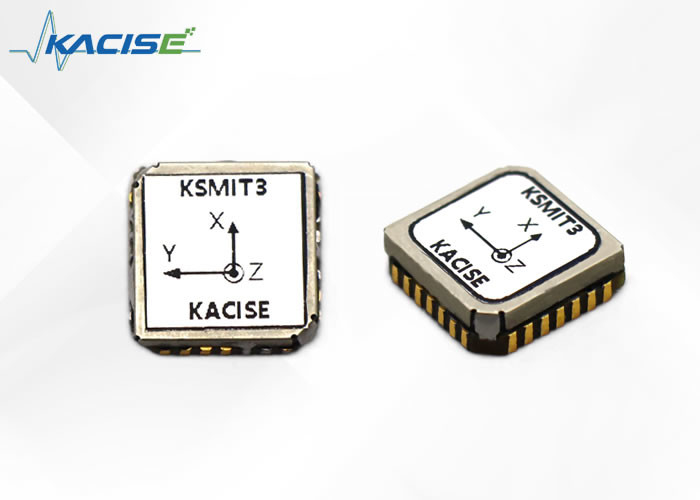
KSMIT3 wykorzystuje praworęczny system współrzędnych, a domyślna ramka czujnika jest zdefiniowana zgodnie z rysunkiem 13.odnoś do podręcznika Integracja sprzętuNiektóre z powszechnie stosowanych wyjściów danych z ich systemem współrzędnych odniesienia wyjściowego są wymienione na rysunku 1.
 Rysunek 1 Domyślny układ stałych współrzędnych czujnika dla modułu KSMIT3
Rysunek 1 Domyślny układ stałych współrzędnych czujnika dla modułu KSMIT3
Protokół komunikacji użytkownika
Prędkość baudów wynosi 115200 bps, 230400 bps i 460800 bps. BIT danych 8, stop bIT 1, bez bitu kontrolnego. Wysokie bajty są pierwsze, a niskie bajty są ostatnie.Domyślna częstotliwość przesyłania jest 230400bps.
| Liczba bajtów |
Nazwa |
Typ bajtów |
Wielkie-kation |
Zakres |
NieIT |
Opis |
| 1 ~ 2 |
Nagłówek ramki |
U,2 |
|
|
|
0XAA 71 |
| 3 |
Numer formatu ramki |
Wartość stała 3=0x03 |
| 4 |
Długość ramki komunikacyjnej |
Wartość stała 100=0x64 |
| 5~13 |
Gyro |
S3*3 |
1e-4 |
± 838.8608 |
°/s |
X/Y/Z Po prawej/przedniej/górnej stronie |
| 14 ~ 22 |
Acc |
S3*3 |
1e-5 |
± 83.88608 |
g |
X/Y/Z Po prawej/przedniej/górnej stronie |
| 23 ~ 28 |
Magnetyczna |
S3*2 |
1e-2 |
± 327.68 |
UT |
X/Y/Z Po prawej/przedniej/górnej stronie |
| 29~31 |
Hbar |
S1*3 |
1e-2 |
±83886.08 |
mbar |
Barometr |
| 32 |
Flaga |
U,1 |
|
|
|
BIT1-Magnetyczny ważny znak 1-Właściwy
BIT2-Barometryczny ważny znak 1-Właściwy
BIT3- GPS_exist
Informacje GPS wyjście lub nie
0- Brak informacji GPS
1- Dostępne informacje GPS
Informacje BIT4-GPS Wiarygodne oznakowanie 1- Wiarygodne
BIT5-8 Zero wypełnienia
|
| 33~40 |
System zastrzeżonych słów |
|
|
|
|
|
| 41~49 |
GPS_Vele/N/U |
S3*3 |
1e-4 |
± 838.8608 |
m/s |
GPS Wschód/Północ/Szybkość nieba |
| 50 ~ 60 |
GPS_Lon/Lan |
S2*4 |
1e-7 |
± 214.7483648 |
° |
GPS Długość/GPS szerokość |
| GPS_Hmsl |
S1*3 |
1e-2 |
±83886.08 |
m |
GPS AltITude |
| 61~62 |
GPS_Głowy |
S1*2 |
1e-2 8 |
± 327.6 |
° |
Położenie GPS |
| 63 |
GPS_Status |
U,1 |
|
|
|
BIT1~4-Liczba satelitów pozycjonowania GPS (maksymalnie 15)
BIT5 -Znak pozycjonowania GPS 1 ważny
BIT6~8- Typ pozycjonowania GPS
GPS_ Fixtype
0x00=Nie naprawione
0x01=Tylko w przypadku śmierci
0x02=2d Rozwiązanie
0x03=3d-Fix
0x04=Gnss + Dead Receiving połączone
0x05=Tylko czas naprawi
|
| 64 ~ 65 |
GPS_Pdop |
U,2 |
1e-2 |
|
|
|
| 66~71 |
Ins_Att |
S2*2 |
1e-2 |
± 327.68 |
° |
Ptich ±90° Roll ±180° |
| S1*2 |
655.36 |
° |
Zgięcie ±180° |
| 72 do 80 |
Vn |
S3*3 |
1e-4 |
± 838.8608 |
m/s |
Własność |
| 81~89 |
Pos. |
S2*4 |
1e-7 |
± 214.7483648 |
° |
Długość/szerokość |
| S1*3 |
1e-2 |
±83886.08 |
m |
AltITude |
| 92 |
Mody i scenariusze |
U,1 |
|
|
|
BIT1~4- Tryb pracy
Align=1; Ins=2; Ahrs=3; Vg=4
BIT5~8- Scenariusz pracy
1=Na pokładzie;2=Wewnętrzny;3=Na pokładzie 4=Fiksowane skrzydło;5=Rotor
|
| 93~96 |
Rezerwa |
|
|
|
|
Zero wypełnienie |
| 97~98 |
Temperatura |
S,2 |
1e-2 |
± 327.68 |
°C |
|
| 99 |
Hrabia. |
U,1 |
|
|
|
|
| 100 |
Kod sprawdzania |
|
|
|
|
Suma wszystkich znaków przed BIT |
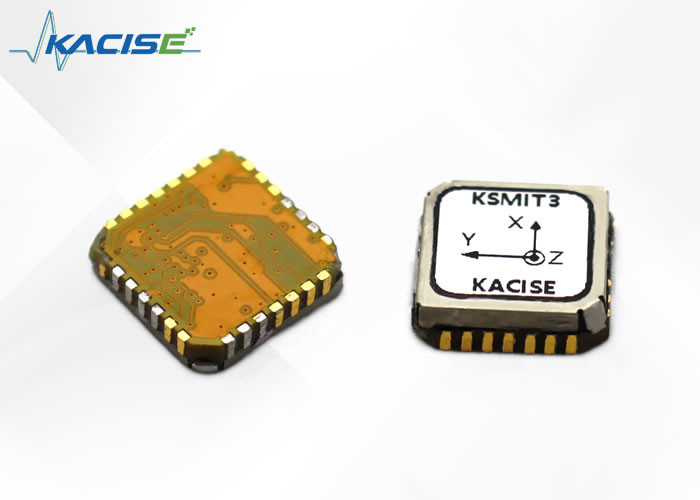
Konfiguracja szpilki
Rysunek 2: Konfiguracja szpilki modułu KSMIT3 (widok z góry)
| Numer |
Nazwa |
Rodzaj |
Opis |
| 7 |
VDDIO |
Władza |
Digitalne napięcie zasilania |
| 8 |
GND |
| 23 |
UART_RX |
Interfejs UART |
Wprowadzenie danych odbiornika |
| 24 |
UART_TX |
Interfejs UART |
Wyjście danych nadajnika |
| 25 |
GND |
| 18 |
AUX_RX A |
Pomocny interfejs GNSS |
Wprowadzenie danych odbiorcy z modułu GNSS |
| 19 |
UX_TX |
Pomocny interfejs GNSS |
Wyjście danych nadajnika do modułu GNSS |
| 20 |
SYNC_PPS |
Pomocny interfejs GNSS |
Impuls na sekundę z modułu GNSS |
Ustawienia parametrów
Produkt jest ustawiony domyślnie w stanie "nieprzerwanego wyjścia" po włączeniu, a aby ustawić parametry, należy najpierw wysłać polecenie "stop output".Użytkownik musi włączyć i uruchomić ponownie, aby automatycznie przejść do stanu ciągłej transmisji.
1 Przerwanie wyjścia
Zatrzymanie wyjścia polega na przełączeniu domyślnego stanu "nieprzerwanego wyjścia" na zasilanie do stanu "parametrowe ustawienia".
Wysyłany do: * PA space GS01 space STOP wagon powrót
Odpowiedź:
* Przestrzeń PA Przestrzeń GS01 Przestrzeń STOP Przestrzeń 0 Powrót wagonu Nie udało się
* PA przestrzeń GS01 przestrzeń STOP przestrzeń 1 powrót powozu Z powodzeniem
2 Ustawienie scenariuszy pracy
Produkt musi przełączać parametry filtra w zależności od różnych scenariuszy zastosowania.w przypadku scenariusza domyślnego na pokładzie dla zasilania.
Przełączanie sceny to przełączanie domyślnej "sceny samochodu" po włączeniu do rzeczywistej sceny.
Wyślij: * PA przestrzeń GS01 przestrzeń SCENES przestrzeń 1 powrót powozu
Odpowiedź:
* PA przestrzeń GS01 przestrzeń SCENES przestrzeń 1 przestrzeń 0 powrót powozu Nie udało się
* PA przestrzeń GS01 przestrzeń SCENES przestrzeń 1 przestrzeń 1 powóz powrót
Uwaga: Podkreślone znaki obejmują 1-montowane na samochodzie, 2-montowane w pomieszczeniach wewnętrznych, 3-montowane na statku, 4-koncentrowane skrzydła i 5-rotorowe opcjonalne.
3 Ustawić współczynnik Baud
Domyślna częstotliwość przesyłania danych jest 230400bps, którą można przełączyć poprzez wysyłanie poleceń.
Wyślij: * PA przestrzeń GS01 przestrzeń BAUD przestrzeń 1 powrót powozu
Odpowiedź:
* Przestrzeń PA Przestrzeń GS01 Przestrzeń BAUD Przestrzeń 1 Przestrzeń 0 Powrót wagonu Nie udało się
* PA przestrzeń GS01 przestrzeń BAUD przestrzeń 1 przestrzeń 1 powrót powozu
Uwaga: Zawartość podkreślonych znaków wynosi 1-115200bps, 2-230400bps i 3-460800bps, które są opcjonalne.
4 Przywrócić ustawienia fabryczne
Przywracanie ustawień fabrycznych obejmuje ustawienie sceny roboczej, formatu klatki, częstotliwości baudów, deklinacji magnetycznej i kalibracji pola magnetycznego na wartości domyślne.
Wyślij: * PA przestrzeń GS01 przestrzeń RESET powrót powozu
Odpowiedź:
* Przestrzeń PA Przestrzeń GS01 Przestrzeń RESET Przestrzeń 0 Powrót wagonu Nie udało się
*PA przestrzeń GS01 przestrzeń RESET przestrzeń 1 powrót powozu
5 Ustawić kąt deklinacji magnetycznej
Domyślna deklinacja magnetyczna wynosi 0, z dodatnim magnetycznym północnym wschodem i ujemnym magnetycznym zachodem.
Wyślij: * przestrzeń PA przestrzeń GS01 przestrzeń MDEC przestrzeń +/- XX.XX powrót wagonu
Odpowiedź:
* Przestrzeń PA Przestrzeń GS01 Przestrzeń MDEC Przestrzeń 0 Powrót wagonu Nie udało się
* PA przestrzeń GS01 przestrzeń MDEC przestrzeń 1 powrót powozu
Uwaga: Jeśli kąt deklinacji magnetycznej wynosi -2,5 stopnia, struna podkreślana wynosi -02.50; jeżeli kąt deklinacji magnetycznej wynosi +1,5 stopnia, struna podkreślana wynosi +01.50.
6 Kalibracja pola magnetycznego
Podczas pracy czujników magnetycznych, IT jest nieunikniony wpływ zakłóceń otaczających pól elektromagnetycznych,które mogą prowadzić do różnego stopnia odchylenia i deformacji oś XYZ, intensywności pola magnetycznego mierzonej przez czujnik magnetycznyKalibracja pola magnetycznego ma na celu zrekompensowanie miękkich i twardych interferencji magnetycznych poprzez algorytm uczenia się otaczającego środowiska pola magnetycznego.Zalecamy silnie, aby kalibracja pola magnetycznego była wdrażana po każdej instalacji i po zmianach w środowisku pola magnetycznego.
Przy wykonywaniu kalibracji pola magnetycznego otaczające substancje zakłócające powinny pozostać niezmienione (tj.W trakcie procesu obrotu produktu i względnej pozycji produktu.Kalibracja wymaga, aby operator nie miał telefonów komórkowych, kart magnetycznych, kluczy ani metalowych lub napędzanych urządzeń, które mogą wpływać na pole elektromagnetyczne na jego ciele.
Uwaga: tylko w obrębie ograniczonego zakresu zakłóceń operacja kalibracji pola magnetycznego może mieć efekt kompensacyjny.Zakres czujnika magnetycznego wynosi mniej więcej między plusem a minusem 1 GaussJeśli wartość zakłóceń pola magnetycznego przekracza plus lub minus 0,5 Gauss, magnetometr może osiągnąć stan nasycenia,które utrudniają efekt rekompensaty. Gdy kalibracja się nie uda, IT wskazuje, że wystąpił problem.
Kalibracja 2D
Uwaga: Jeżeli produkt nie może obracać się w trójwymiarowości, można zastosować kalibrację 2D. Zaleca się, aby rzeczywisty kąt nachylenia produktu był mniejszy niż 5 stopni.Kalibracja 2D może być wykonana za pośrednictwem interfejsu lub portu seryjnego poprzez wydawanie poleceń.
1. Rozpoczęcie kalibracji: przed kalibracją użytkownika, wysłać
Wyślij: * PA przestrzeń GS01 przestrzeń MCAL przestrzeń START powrót powozu
Odpowiedź:
* Przestrzeń PA Przestrzeń GS01 Przestrzeń MCAL Przestrzeń START Przestrzeń 0 Powrót wagonu Nie udało się
*PA przestrzeń GS01 przestrzeń MCAL przestrzeń START przestrzeń 1 powrót powozu
2 Stop kalibracji: rozpocząć obrót poziomy przez więcej niż 2 zakręty i wysłać po zakończeniu
Wysyłaj: * przestrzeń PA przestrzeń GS01 przestrzeń MCAL przestrzeń END powrót powozu
Odpowiedź:
* Przestrzeń PA Przestrzeń GS01 Przestrzeń MCAL Przestrzeń 0 Powrót wagonu Nie udało się
* przestrzeń PA przestrzeń GS01 przestrzeń MCAL przestrzeń 1 przestrzeń X: x.xx przestrzeń Y: y.yy powrót powozu
Uwaga: Wyniki kalibracji wynoszące 0,90-1 wskazują na dobre wyniki kalibracji, natomiast > 1,1 lub < 0,9 wskazują na słabe wyniki kalibracji.
3. Zapisz wyniki kalibracji: Po kalibracji użytkownika, zdecyduj, czy zapisać na podstawie wyników kalibracji.
Wyślij: * PA przestrzeń GS01 przestrzeń MCAL przestrzeń SAVE wagon powrót
Odpowiedź:
* Przestrzeń PA Przestrzeń GS01 Przestrzeń MCAL Przestrzeń SAVE Przestrzeń 0 Powrót wagonu Nie udało się
*PA przestrzeń GS01 przestrzeń MCAL przestrzeń SAVE przestrzeń 1 powrót powozu
4. Wyraźne wyniki kalibracji: po kalibracji użytkownik decyduje, czy wyczyścić na podstawie wyników kalibracji.
Wyślij: * PA przestrzeń GS01 przestrzeń MCAL przestrzeń CLEAR powrót powozu
Odpowiedź:
* PA przestrzeń GS01 przestrzeń MCAL przestrzeń CLEAR przestrzeń 0 wagon powrót Nie udało się
*PA przestrzeń GS01 przestrzeń MCAL przestrzeń CLEAR przestrzeń 1 powrót powozu
AAplikacje
Pojazdy lotnicze miniaturowe
• Drony dostawcze
• Drony wideo
• UAV rolnicze
Maszyny
• Komunikacja satelitarna w ruchu (SotM)
• Maszyny budowlane
• Monitorowanie statków
Robotyka
• autonomiczne rolnictwo
• Automatyzacja magazynowa
• Robotowe ramiona
Pozostałe zastosowania
• Urządzenia ręczne
• Nawigacja dla pieszych
• VR/AR i HMD
•Pomoc w nawigacji
Wsparcie i usługi:
Witamy w naszym zespole ds. wsparcia technicznego i usług dla czujników giroskopów.lub konserwacji czujnika gyroskopuZobowiązujemy się zapewnić Państwu jak najlepsze wsparcie, aby Państwa produkt działał optymalnie.
Nasze wsparcie obejmuje szczegółową dokumentację produktu, często zadawane pytania (FAQ) oraz przewodniki do rozwiązywania problemów, które mają pomóc w szybkim rozwiązywaniu typowych problemów.W przypadku bardziej złożonych lub szczególnych problemówNasz zespół wsparcia technicznego jest gotowy do zapewnienia spersonalizowanej pomocy.
Jeśli potrzebujesz dalszej pomocy, please refer to the 'Contact Us' section of our website (contact information excluded as per request) where you can find additional resources and support channels to get in touch with our professional technical support team.
Dziękujemy za wybór naszego Electronic Gyroscope Sensor.
Opakowanie i wysyłka:
Czujnik elektronicznego giroskopu jest starannie pakowany w torbę antystatyczną w celu zapewnienia ochrony przed rozładowaniem elektrostatycznym (ESD).pleśni o wysokiej gęstościPianka ta jest umieszczona w trwałym,pudełko kartonowe z marką, które chroni czujnik przed czynnikami środowiskowymi i potencjalnym uszkodzeniem podczas transportu.
Na zewnątrz pudełka znajdują się etykiety z nazwą produktu, instrukcje obsługi i kod kreskowy dla łatwego śledzenia.oferuje dodatkową warstwę bezpieczeństwa.
W przypadku wysyłki elektroniczny czujnik giroskopu jest wysyłany za pośrednictwem zaufanej firmy kurierskiej, aby zapewnić terminową i bezpieczną dostawę.zapewniając spokój umysłu i ochronę inwestycjiInformacje dotyczące śledzenia są dostarczane od razu po wysłaniu paczki, co pozwala na monitorowanie w czasie rzeczywistym przesyłki do czasu jej dotarcia do miejsca przeznaczenia.

 Twoja wiadomość musi mieć od 20 do 3000 znaków!
Twoja wiadomość musi mieć od 20 do 3000 znaków! english
english
 français
français
 Deutsch
Deutsch
 Italiano
Italiano
 Русский
Русский
 Español
Español
 português
português
 Nederlandse
Nederlandse
 ελληνικά
ελληνικά
 日本語
日本語
 한국
한국
 العربية
العربية
 हिन्दी
हिन्दी
 Türkçe
Türkçe
 indonesia
indonesia
 tiếng Việt
tiếng Việt
 ไทย
ไทย
 বাংলা
বাংলা
 فارسی
فارسی
 polski
polski